User Verification for Motion-controlled Robotic Arm Systems
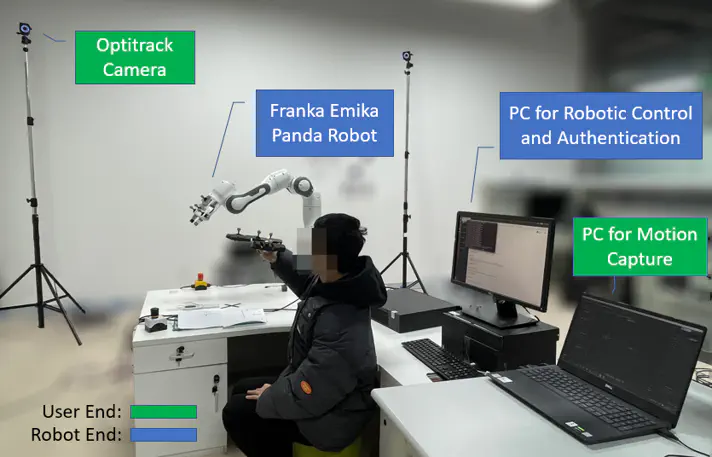
- Built up a motion-controlled robotic arm framework comprising a robotic arm end and a user end, which are connected via a network and responsible for manipulator control and motion capture respectively.
- Proposed to verify who is controlling the robotic arm by examining the robotic arm’s behavior, which adds a second security layer in addition to the system login credentials.
Long Huang
My research interests include mobile sensing, mobile security and IoT.